�S�����������}���ИI(y��)��Ѹ�ٰl(f��)չ�����ܻ����w�}���Ľ�Q����Ҳ����������ߎ����ʡ��ߴ惦Ч�ʡ��ͳɱ��������������
���ܻ����w�}����Q������Ŀǰ��Ҫ���������һ�ǻ�����܉�щK�C�����w�}������Ҫ��(y��ng)�����Lͨ������λ؛�ܵĈ������惦Ч�ʸߡ������m���ԏ������ɱ�ƫ�������ǻ��ڴ���܇�����w�}������Ҫ��(y��ng)�����е�λ؛�ܣ��a(ch��n)Ʒͬ�|(zh��)���^���Ĉ������ɱ��ͣ����惦Ч�ʵ͡������m�����^�������ǻ��ڟo�˲�܇�����w�}���ڣ���Ҫ��(y��ng)�����е�λ؛�ܡ���ͨ���������惦Ч�ʸߣ������m���ԏ����ɱ��m�С��o�˲�܇����һ�N����܇�v�C���ˣ�����܇���g(sh��)��AGV ���g(sh��)����ںϣ������ܻ����w�}���I(l��ng)��ռ��(j��)Խ��Խ��Ҫ���Ј�������܇���w��ͷ֞��бP�Ѷ�ʽ�o�˲�܇��ƽ����ʽ�o����܇������ʽ�o����܇��ǰ��ʽ�o�˲�܇�������\��ʽ�o����܇�͂�(c��)��Ѷ�ʽ�o����܇�ȡ����У����ڟo�˲�܇���Ј���ȱ��ͬ�r��Ѷ�ͨ��խ���惦Ч�ʸߡ������ʸߵȃ�(y��u)�c�Įa(ch��n)Ʒ��
�����������}���������һ�Nխͨ����(c��)��Ѷ�ʽ�o�˲�܇�����º��Q�o�˲�܇���O(sh��)Ӌ������Ȼ����o�˲�܇��һ���O(sh��)Ӌ�y�c����Һ��ͬ�����}���ęCе�Y(ji��)��(g��u)��Һ��ϵ�y(t��ng)�ɷ������Ԕ�����O(sh��)Ӌ���������ͨ�^3Dܛ�������M��ģ�K����ģ����ͨ�^�әCԇ�ķ�����C�O(sh��)Ӌ�ĺ����ԣ����Cԓ�a(ch��n)Ʒͬ�r��Ѷ�ͨ��խ���惦Ч�ʸߡ������ʸߵȃ�(y��u)�c��
�o�˲�܇�O(sh��)Ӌ���P(gu��n)�I����(sh��)��Ҫ������ ���؛�����������؛�����w�ߴ硢�d�����ľࡢ��С�Ѷ�ͨ�����ȡ������e���߶ȡ�؛��δ�����϶ȡ���������ٶȡ��M�d��������ٶȡ����У���С�Ѷ�ͨ��������ָ��܇��؛��ͨ����(n��i)�܉�Ѷ����I(y��)�r������(y��ng)��ͨ����С���ȡ�����e���߶���ָ؛��ˮƽ�λ�����ƽ�_�ϱ���������֮�g���Ĵ�ֱ���x��؛��ĩ�����������ָ؛�����~��ؓ�d������г̕r��؛��δ�����Qֱ�����Ϯa(ch��n)�������λ�ơ������漰�o�˲�܇���P(gu��n)�I����(sh��)������1����ʾ��
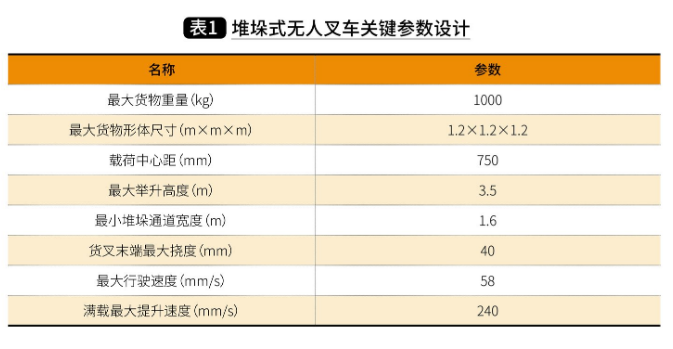
���У�������Ч�pС�Ѷ�ͨ�����ȣ���(j��ng)�Y(ji��)��(g��u)�O(sh��)Ӌ����С�Ѷ�ͨ�������ɂ��y(t��ng)��3�s�p��1.6�ף���������˽K�˂}���Ď����ʡ�
���ܻ����w�}����ϵ�y(t��ng)��ȫ�z�y�����Ŀ�����\�D(zhu��n)���țQ�l����Ҳ�����c���O(sh��)Ӌ�����ڟo�˲�܇�����w�}������ȫ�z�y��Ҫ��܇�w�������c܇�w���ӵ������b�Ãɷ��濼�]��ᘌ��������}������(ji��)����İ�ȫ�z�y����������
�����b������ �O(sh��)Ӌ���бP��λ�b�ú�؛��ߴ糬�ނ���������؛��ȳ��ޡ��L�ȳ��ޡ��߶ȳ��ޕr���l(f��)������̖���� �O(sh��)Ӌ��؛�ﳬ����������؛�ﳬ�ؕr�l(f��)������̖���� �O(sh��)Ӌ��؛��λ�ó���z�y���������Á��Д�؛���Пo�Ă�������
�o�˲�܇���� �d؛ƽ�_�ϣ��O(sh��)Ӌ���������b��ܣ����b��؛��ߴ糬�ނ���������؛��ȳ��ޡ��L�ȳ��ޡ��߶ȳ��ޕr���l(f��)������̖���� �d؛ƽ�_���O(sh��)Ӌ���Д��бP�Пo���Д���С��M�еĂ��������� Һ��ϵ�y(t��ng)���O(sh��)Ӌ�Љ����z�y����������؛�ﳬ������ϵ�y(t��ng)���������r��ϵ�y(t��ng)�l(f��)������̖���� ؛����؛���Пo�ęz�y���������o�˲�܇�M��ǰ����ͨ�^���������z�y؛����؛����Пo��ͬ�r��C�����߶ȵ����_�ԣ��Դ_���M�氲ȫ���� �o����܇���b�����݃x����?sh��)ױP�Aб����r����܇���l(f��)������̖������ֹ�e�����I(y��)��
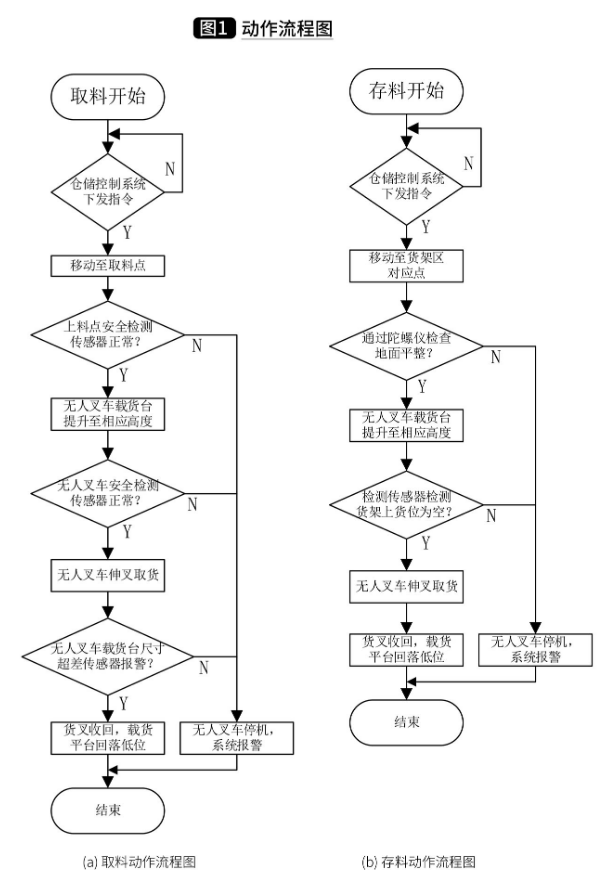
���چδδ��؛��Ą������c�δ�ȡ��؛��ĽM�Ʉ�����ͬ����������ƣ������Ԇδδ��؛��Ą��������о������M���O(sh��)Ӌ�����υ^(q��)ȡ�ϕr���������������D1-��a������ʾ���o�˲�܇����(j��)WCS��Warehouse Control System�� �}������ϵ�y(t��ng)ָ�ͨ�^ֱ�С���(c��)���Ƅӡ��D(zhu��n)���Ȅ������Ƅ��������c���_�J�����c��ȫ�z�y�������o�����������d؛�_����������(y��ng)�߶ȣ�ͬ�r�o�˲�܇��ȫ�z�y�������������c؛���M�а�ȫ�z�y���o���������ȡ؛����؛���ջص��^���У��o�˲�܇�d؛�_�ijߴ糬����������r�r��؛��ĸߺ͌��M�гߴ糬��z�y��һ�����F(xi��n)�ߴ糬��o�˲�܇ͣ�C��ϵ�y(t��ng)����؛���ջ��^���Пo������؛��ص���λ�齵�͟o�˲�܇���ģ����C�\�е�ƽ��(w��n)��ȫ�ԣ�ͬ�r���؛����Ч�ʣ��d؛ƽ�_���������x��800mm̎��
؛�܅^(q��)���ϕr���������������D1-��b������ʾ���o�˲�܇����(j��) WCS �}������ϵ�y(t��ng)ָ�ͨ�^ֱ�С���(c��)���Ƅӡ��D(zhu��n)���Ȅ������Ƅ���؛�܅^(q��)����(y��ng)�c������ͨ�^���݃x�z�����ƽ����r���_����܇�Aб��r�M�㰲ȫҪ��Ȼ���d؛ƽ�_����������(y��ng)��λ�߶ȹ�늙z�y�������z�y؛����؛λ���؛������������(y��ng)��λ������ƽ�_����؛���������w؛���ϡ����؛���ջأ��d؛ƽ�_���䵽��λ����ȡ���τ�������ɡ�
����ģ�K������a(ch��n)Ʒ�Y(ji��)��(g��u)�M�п��w�O(sh��)Ӌ����Ҫ��؛��������؛�桢܇�w�ױP�����濼�]��
؛������������ں����e���߶ȵ���չ��������܇���ĸ߶ȣ����o�˲�܇������s�T�܌��F(xi��n)�d؛ƽ�_��������������֧��؛�������߶� 8 �����ϡ�ͬ�r������؛�������^�أ��鱣�C��λ�r��s�T�ܵĄ��ԣ����o�˲�܇�O(sh��)Ӌ���p��s�T�ܡ����У������߶�ͨ�^���K���a���z�y��
؛����������؛���ȡЧ�ʣ����͂}��ͨ�����ȣ����o�˲�܇�O(sh��)Ӌ���p����s؛�棬�Ԃ�(c��)���M��ķ�ʽ���؛���ȡ�š���s؛�����O(sh��)Ӌ����λ�z�y���������г���λ��������
܇�w�ױP�������p��݆����݆��4���f��݆֧�εĵױP�Y(ji��)��(g��u)����݆�O(sh��)Ӌ�и��ӽY(ji��)��(g��u)���ױPͨ�^�Ͳĺ��Ӷ��ɣ�ʹ��܇�Ɍ��F(xi��n)�D(zhu��n)������������(c��)�ƹ��ܡ�
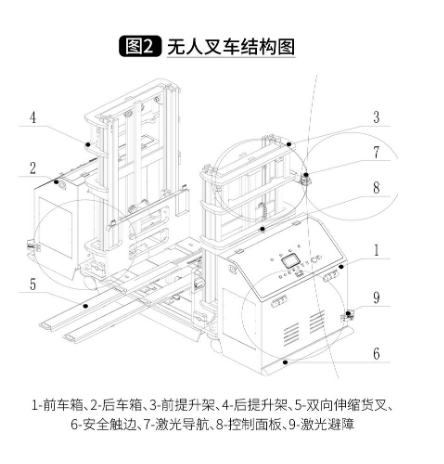
�C�ϣ��o�˲�܇��Ԕ�����֞�ǰ܇�䡢��܇�䡢ǰ�����ܡ��������ܡ��p����s؛�桢��ȫ�|߅�����⌧(d��o)����������塢������ϡ������ױP��Һ��ϵ�y(t��ng)�����ϵ�y(t��ng)����ȫ�z�yϵ�y(t��ng)�ȣ���܇�Y(ji��)��(g��u)�����D2����ʾ��
 sales@ohuojia.com
sales@ohuojia.com +086-132-2298-2500
+086-132-2298-2500 400-086-2500
400-086-2500